|
|
Area
- Signal Processing, Estimation Theory and Applications
- Kalman Filtering, Multi-Sensor Data Fusion and Target Tracking
- Precise Positioning and Attitude Determination
- Sensor Integration (e.g. GPS/INS/DR/etc.)
- GNSS Receiver/Signal Design
- Next Generation GNSS System Design and Analysis
- Navigation/Communication System Applications to Next Generation Smart Vehicles
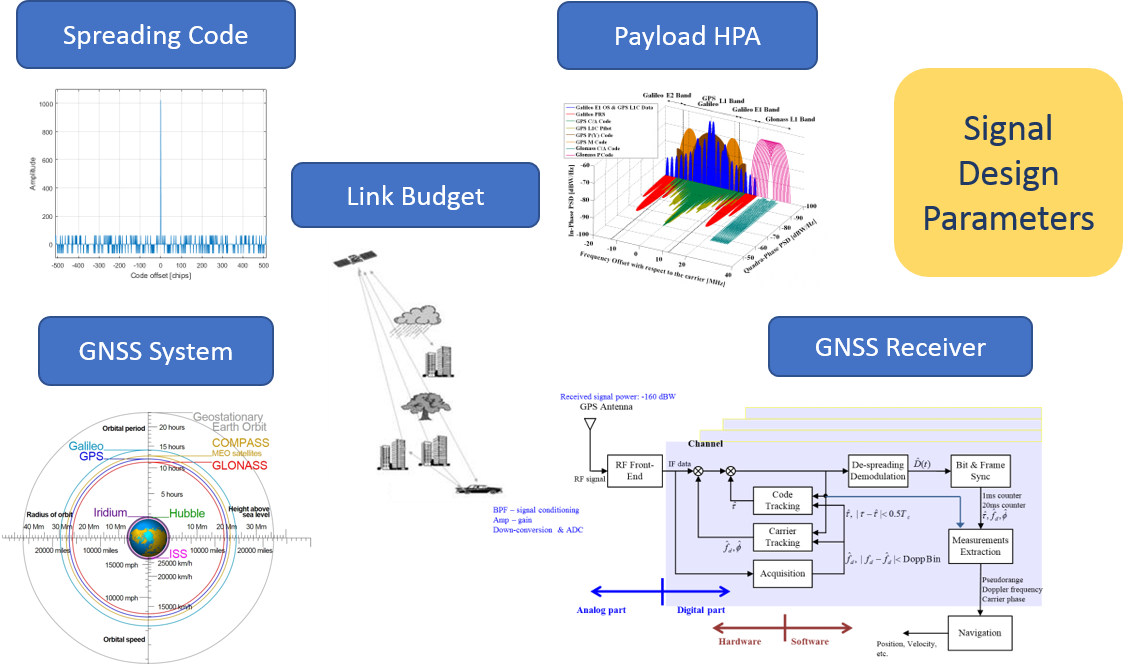
GNSS SYSTEM/SIGNAL DESIGN
- Study on signal design methodologies for next generation GNSS
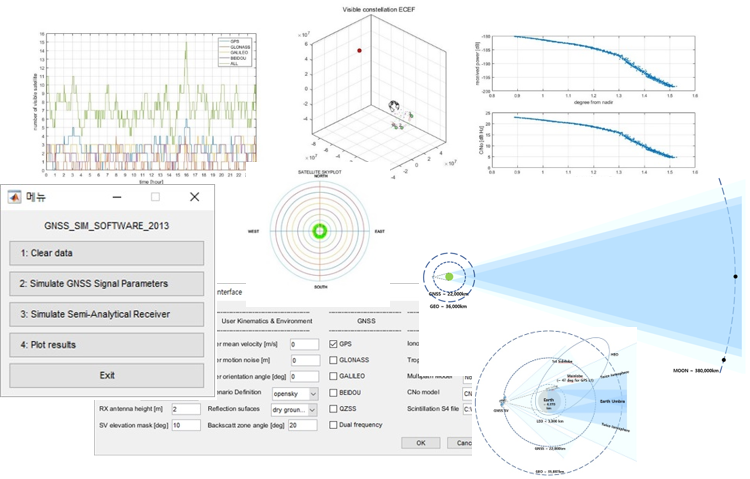
- Development of signal design S/W Tool for next generation GNSS/KPS
- KPS signal design and performance tests
- Multi-constellation and multi-frequency GNSS/KPS signal generation simulator
GNSS RECEIVER
- Analysis of GNSS signal availability
- Fully reconfigurable software defined receiver (SDR)
- Fully reconfigurable software defined signal generator/simulator
- Navigation implementation using Least-Squares, Kalman filter, and VTL
- High performance signal processing for spaceborne (SSV) GNSS receivers
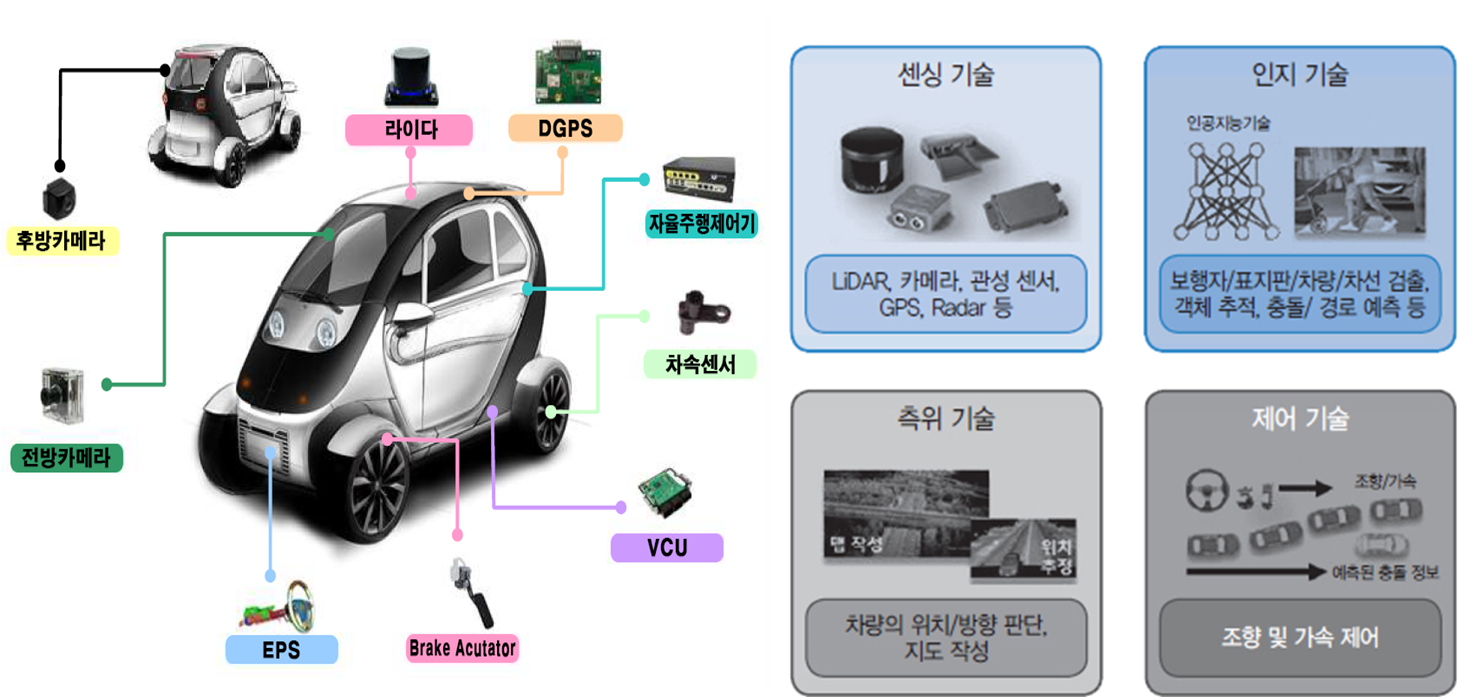
AUTONOMOUS DRIVING
- Commercial game engine-based autonomous driving simulator technology
- Sensor fusion (GNSS/IMU/Lidar/Camera/Ultra-sonic/etc.) and path planning
- Development of autonomous driving test vehicles and mobile robots
- UAV navigation, guidance and control
|